Optimización del rendimiento
En esta página, le mostraremos cómo configurar un producto CODESYS Control SL basado en Linux para su dispositivo y su aplicación para que pueda obtener el mejor rendimiento posible.
Le proporcionamos herramientas que puede utilizar para comprobar y evaluar el estado actual de su sistema.
Recomendamos el siguiente procedimiento. Siga estos pasos en el orden especificado. No tiene sentido pasar al siguiente paso si el actual no está tan optimizado como debería.
Importante
Después de cada paso, compruebe que el último cambio no haya afectado negativamente a las optimizaciones de los pasos anteriores.
Una vez que haya logrado el rendimiento deseado bajo carga normal, opcionalmente puede realizar una prueba bajo carga alta con stress-ng o iperf.
Puede encontrar más información en los siguientes sitios web:
Comprobando el hardware
No utilice cachés compartidos para los núcleos del procesador de su controlador.
Si utiliza buses de campo basados en Ethernet para su dispositivo de destino, utilice un adaptador físico para ellos. No utilice
Configurando Linux
Utilice un kernel en tiempo real.
Para las demandas en tiempo real, es necesario utilizar el kernel de preferencia RT (https://wiki.linuxfoundation.org/realtime/documentation/start) para su sistema Linux. En el caso de las distribuciones Debian y Ubuntu, encontrará un núcleo RT en forma de paquete que puede instalar fácilmente usando el
aptcomando. Para obtener más información sobre esto, consulte el manual de su distribución.En sistemas Debian
sudo apt-get install linux-image-rt-amd64Comprueba qué kernel estás usando con el
uname -adominio. Por ejemplo.
Evite utilizar un administrador de ventanas, un servidor GUI/X o similar en su sistema.
El uso de estas herramientas podría afectar las capacidades en tiempo real de su sistema, lo que resulta en una alta fluctuación en la aplicación IEC).
Prueba
Uso de "herramientas rt":
Instalación de "rt-tools":
sudo apt install rt-testsIniciando "prueba cíclica":
sudo cyclictest -p 99 -t -mEl
man cyclictestEl comando le muestra más opciones de línea de comandos que puede usar para medir mejor aspectos de rendimiento más específicos de su sistema.
Si el valor determinado con cyclictest puede considerarse «bueno» en función del hardware. Si utilizas un procesador muy potente (por ejemplo, el Intel Core i7), deberías tener un número bajo de 1 dígito como máximo. Si utilizas un procesador ARM antiguo, 100 podría ser un buen resultado
Opciones de optimización
Importante
Después de cambiar cada ajuste o combinación de ajustes, debe ejecutar cyclictest programa para verificar la eficacia de los cambios.
Estas configuraciones no son persistentes y, por lo tanto, deben restablecerse después de arrancar o reiniciar el sistema.
Aviso
En la versión 4.21.0.0 y superior, CODESYS proporciona un comando PLC shell que genera directamente la mayoría de estos valores. Para ello, ejecute el system-creatertreport comando. Para obtener más información sobre el comando, ejecute system-creatertreport ?.
Desactive el modo de ahorro de energía de la CPU.
Deshabilite el hiperproceso.
Puede usar el siguiente comando para deshabilitar el hiperproceso (ejemplo):
echo off | sudo tee /sys/devices/system/cpu/smt/controlDeshabilite el escalado y cambio de frecuencia de la CPU tanto como sea posible.
Por ejemplo, establezca la frecuencia mínima y máxima de la CPU en el mismo valor (fijo).
Deshabilite el mecanismo de limitación en tiempo real del kernel de Linux, ya que esto puede provocar fluctuaciones en su sistema.
Para obtener más información, consulte: The Linux Foundation: Programación: aceleración de RT
Puedes usar el siguiente comando para deshabilitar la limitación en tiempo real (ejemplo):
echo -1 > /proc/sys/kernel/sched_rt_runtime_usVerifique y cambie el gobernador de programación/escalado.
Verifique el gobernador de programación/escalado utilizado:
cat /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
Cambie el regulador de programación/escalado utilizado (como
root/admin) aPerformance:echo "performance" > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor # set it for all available cores: echo "performance" > /sys/devices/system/cpu/cpu1/cpufreq/scaling_governor echo "performance" > /sys/devices/system/cpu/cpu2/cpufreq/scaling_governor echo "performance" > /sys/devices/system/cpu/cpu3/cpufreq/scaling_governor
Tenga en cuenta que el regulador de escala debe restablecerse cada vez que se inicia el sistema. También puedes configurarlo mediante la configuración del kernel.
El
intel_pstateEl controlador del kernel puede dificultar la configuración correcta. Por lo tanto, debes utilizar elcpufreq-infocomando para verificar su configuración.También puedes utilizar programas como
cpu-freq-utils. Esto podría interferir con los controladores Intel pstate. Estos controladores normalmente requieren un enfoque diferente para configurar la frecuencia de la CPU.Para más información, ver: https://www.kernel.org/doc/Documentation/cpu-freq/governors.txt
Desactivar
HyperVen el BIOS (si está disponible).
Configuración del sistema de ejecución CODESYS
Cree una aplicación de prueba que describa aproximadamente la aplicación para la cual desea optimizar su sistema (en términos de recursos requeridos, rendimiento requerido y tamaño del proyecto).
Puede hacer esto de forma iterativa: primero cree una aproximación muy aproximada y luego amplíela para acercarse cada vez más a la aplicación real.
Prueba
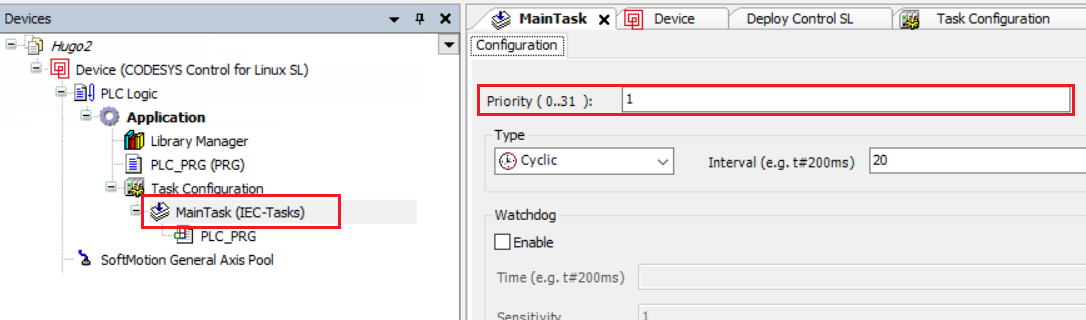
Cuando la aplicación se esté ejecutando, verifique la configuración de la tarea. Abre el Configuración de tareas y seleccione el Monitor pestaña.

Mín. Jitter (μs) / Máx. Jitter (μs)
Los valores deben ser lo más cercanos posible a los valores determinados por el programa "cycletest". Los detalles se describen en la sección Configurando Linux.
Para obtener más información sobre la fluctuación y la latencia, consulte: Definiciones de fluctuación y latencia
Para obtener más información sobre la pestaña Monitoreo, consulte: Pestaña: Monitoreo
Tiempo de ciclo promedio (μs) / Máx. Tiempo de ciclo (μs) Tiempo de ciclo (μs)
El ciclo máximo nunca debe acercarse al tiempo del ciclo configurado. Esto genera problemas tan pronto como el sistema experimenta una carga elevada.
Mantenga siempre el tiempo del ciclo lo más corto posible.
Opciones de optimización
Importante
Después de cambiar cada ajuste o combinación de ajustes, debe ejecutar cyclictest programa para verificar la eficacia de los cambios.
Divida las tareas de larga duración en varias tareas más pequeñas.
Cuando se ejecuta, el tiempo de ciclo máximo de la tarea de mayor prioridad nunca debe alcanzar el tiempo de ciclo configurado. Si no puede evitar esto, entonces debe aumentar el tiempo de ciclo configurado para asegurarse de que los tiempos de ejecución sean consistentes.
Al iniciar sistemas de bus de campo (por ejemplo, EtherCAT o PROFINET), los ciclos de inicio pueden provocar una carga de CPU ligeramente mayor. En este caso, tiene sentido controlar la carga de la CPU poco después de iniciar la aplicación.
Las siguientes opciones no se pueden cambiar en CODESYS Virtual Control SL, pero debe configurarse en el host:
Establecer el valor para
DisableCpuDmaLatencya 1:[SysCpuHandling] Linux.DisableCpuDmaLatency=1
Tenga en cuenta que esta es la configuración predeterminada a partir de la versión de ejecución 4.11.0.0.
Para verificar su versión de tiempo de ejecución, haga clic en Extras → Actualizar Linux → Sistema → Información del sistema.
Compruebe si realmente se está utilizando el kernel en tiempo real.
A partir de la versión 4.11.0.0, puede utilizar el comando de shell del PLC
rt-get kernelinfopara comprobar esto.Si tienes una versión anterior, puedes probarla directamente en la línea de comandos con el
uname -acomando.Si no se está utilizando el kernel en tiempo real, debe iniciar la optimización desde el principio.
Configuración de la aplicación IEC
Esta sección se refiere a su aplicación real.
Prueba
Puedes utilizar las pruebas del paso anterior. Configuración del sistema de ejecución CODESYS para probar su aplicación IEC.
Opciones de optimización
Importante
Después de cambiar cada configuración o combinación de configuraciones, debe ejecutar el programa "prueba cíclica" para verificar la efectividad de los cambios.
Puedes usar el multinúcleo característica en CODESYS.
Determine las prioridades correctas para sus tareas. Las tareas importantes deberían tener mayor prioridad.
tabla 6. Mapeo de prioridades de tareas IEC y prioridades de subprocesos de Linux:Prioridad de tarea IEC
Prioridad de ejecución
Prioridad de Linux
--
0
88 (SCHED_FIFO)
--
31
57 (SCHED_FIFO)
0 (prioridad más alta en tiempo real)
32
56 (SCHED_FIFO)
15 (prioridad más baja en tiempo real)
47
41 (SCHED_FIFO)
16 (no prioridad en tiempo real)
48
0 (SCHED_OTHER)
31 (no prioridad en tiempo real)
63
0 (SCHED_OTHER)
--
64
0 (SCHED_OTHER)
--
255
(SCHED_INACTIVO)
Aviso
En un sistema Linux convencional, la mayoría de las interrupciones (IRQ) y los trabajadores del kernel tienen la prioridad 50 de Linux. Si se utilizan prioridades superiores (con una carga elevada), es posible que las funciones del sistema (red/almacenamiento) no
Puede configurar la prioridad de una tarea en la configuración de tarea respectiva.
Si no logra el rendimiento deseado después de todos los pasos mencionados aquí, puede consultar las siguientes secciones:
Información específica del bus de campo
Prueba
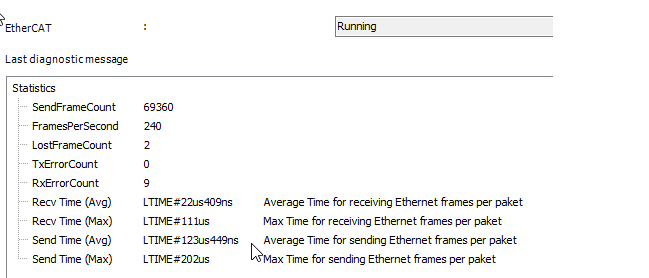
Comprobar el
Send Time/Recv Timevalores en la página de estado de EtherCAT.Una CPU x64 con un procesador Intel Core i7 y un buen adaptador debería tener menos de 10 µs.
Los procesadores ARM con chip integrado tendrán ~50 µs o más.
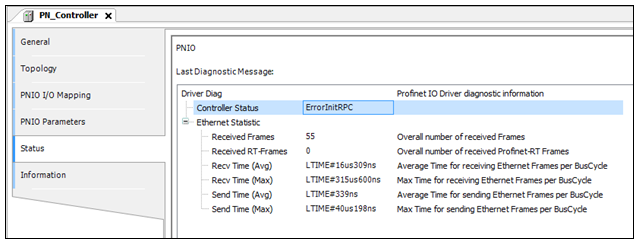
Comprobar el
Send Time/Recv Timevalores en la página de estado de PROFINET.Una CPU x64 con un procesador Intel Core i7 y un buen adaptador debería tener menos de 10 µs.
Los procesadores ARM con chip integrado tendrán ~50 µs o más.
Opciones de optimización
Para ordenar sus prioridades y las IRQ requeridas, puede usar los comandos del shell del PLC
irq-listyirq-set-prio.Estos comandos utilizan las prioridades normales de Linux y no las prioridades IEC.
Esta optimización no es posible en CODESYS Virtual Control SL, sino más bien en el sistema anfitrión.
Utilice un adaptador de red independiente para los dispositivos.
Para más información, ver:
[Para expertos] – Herramientas y temas adicionales
Las herramientas y opciones descritas en esta sección están destinadas únicamente a usuarios avanzados y requieren su propia investigación, porque las medidas a tomar dependen en gran medida del sistema en cuestión. Por lo tanto, no podemos ofrecerle ninguna solución específica.
KernelShark/rastreo del kernel
Este es el programa elegido si descubre que la causa de sus problemas de rendimiento tiene que ver con la programación. Con la ayuda del "rastreo del kernel", puede ver si su tarea está siendo interrumpida por otra tarea, otro servicio o una interrupción.
trace-cmd record -p functionPuede utilizar KernelShark para examinar el generado
trace.datarchivo.
En general, los problemas de programación se pueden dividir en dos categorías:
Reemplazo / preferencia
Si la interrupción o la tarea que impide la ejecución es innecesaria, desactívela.
Aumenta la prioridad de tu tarea o reduce la prioridad de las demás.
Cambie a un núcleo de CPU diferente.
Importante
Compruebe la efectividad de los cambios utilizando los programas descritos en el capítulo anterior.
Tiempo de ejecución
Ver a continuación: "Seguimiento de la función del kernel"
Seguimiento de la función del kernel
Si determina que el tiempo de ejecución del código es demasiado alto, puede utilizar esta herramienta para identificar el problema.
Si la función con un tiempo de ejecución demasiado alto está en su propio código, entonces debe optimizarla.
Si la función con un tiempo de ejecución demasiado alto está en el kernel, entonces puede intentar lograr la funcionalidad deseada con otra función del kernel. Alternativamente, también puede pasar parámetros de configuración al controlador del kernel para reducir el tiempo de ejecución.
Si ninguna de estas opciones resuelve el problema, probablemente necesitará utilizar hardware más potente.
Fíjate en los siguientes puntos y comprueba si son o no la herramienta correcta para alcanzar tus objetivos de rendimiento:
PREEMPT_FULL
isolcpu
rcu_nocbs
rcu_nocb_poll
nosoftlockup
deshabilitar equilibrio irq
kernel.sched_rt_runtime_us